Discover our partners’, Inria and Czech Institute of Informatics, Robotics and Cybernetics, publication “Leveraging Randomized Smoothing for Optimal Control of Nonsmooth Dynamical Systems”.
This paper addresses the challenges faced by Optimal Control (OC) algorithms, like Differential Dynamic Programming (DDP), when applied to non-smooth dynamical systems. OC algorithms struggle with discontinuities and non-informative gradients, while Reinforcement Learning (RL) algorithms can perform better in such scenarios but often require a prohibitive number of samples.
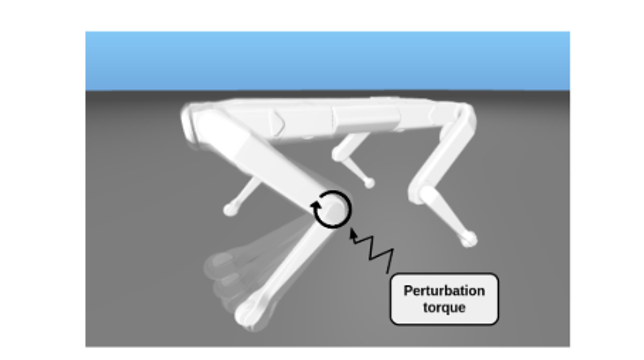
The authors propose the Randomized Differential Dynamic Programming (RDDP) algorithm, which efficiently handles deterministic yet non-smooth dynamics by incorporating Randomized Smoothing (RS) techniques to mitigate the non-smoothness issues in OC. The RDDP algorithm is shown to solve classic robotic problems involving dry friction and frictional contacts in a sample-efficient way.
Read the full paper here.
Find all AGIMUS publications here.